Energyokary energiýa dykyzlygy, ýokary ýük çyzykly modul



1. Aýratynlyklary
Design Dizaýn we gurmak aňsat
○ Ownuk ululyk we ýeňil agram
○ precokary takyklyk
○ idokary berklik
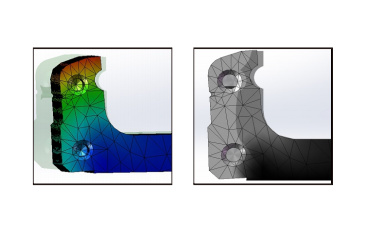
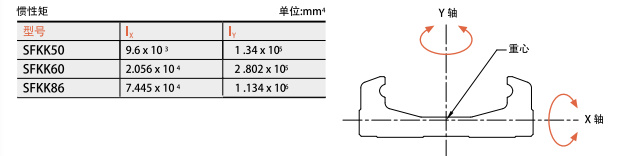
Fully doly enjamlaşdyrylan.Iň oňat düzülen ýol gurluşy, iň oňat berkligi we agramy almak üçin çäkli elementler bilen derňelýär.Derňew aşakdaky suratda görkezilişi ýaly

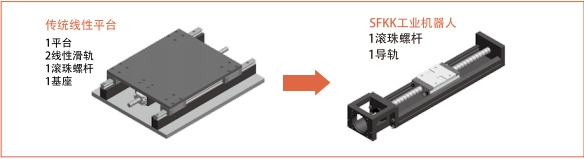
Modully
Modully dizaýn arkaly SFKK senagat robotlary top nurbatlaryny we çyzykly slaýdlary birleşdirýär, bu gollanma we hereketlendiriji komponentleri saýlamak, gurnamak we barlamak, uly ululyk we giňişlige baha bermek ýaly adaty hereket platformalarynyň kemçiliklerini ýok edip biler.Şonuň üçin SFKK senagat robotlary ulanyjynyň ulanyş ýerini we wagtyny ep-esli azaldyp bilýän çalt saýlamak, gurnamak, ykjam ululyk we ýokary berklik ýaly aýratynlyklary üpjün edip biler.
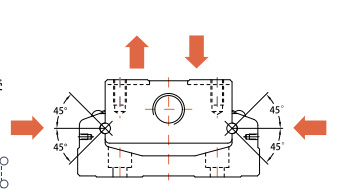
Dört ugurda deň ýük
Trackol bilen süýşürijiniň arasyndaky gaýdyp geliş ulgamy, toplar bilen top çukurynyň arasyndaky kontakt ýüzünde 45 dereje kontakt burçy bilen 2 hatar Gýote diş dizaýnyna eýe.Bu dizaýn, SFKK senagat robotyna dört ugurda deň ýüklere garşy durmaga mümkinçilik berýär..
Ridokary berklik
Trackol konfigurasiýasy U şekilli bölümi kabul edýär we çäkli element derňew programma üpjünçiliginiň dizaýny arkaly göwrümi we berkligi boýunça deňagramlylyk gazanylýar, bu ýoly gaty berk, ululykda ykjam we agramda ýeňil edýär.
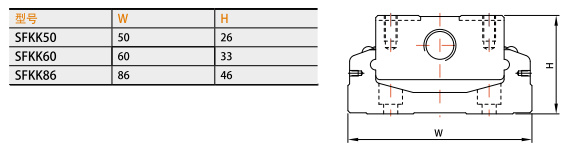
Dürli görnüşli aýratynlyklar
Dürli ulanyş zerurlyklaryna jogap edip, müşderilere ulanyş zerurlyklaryna, giňişlige we ýüklere görä saýlamaga mümkinçilik berýän SFKK senagat robotlarynyň aşakdaky görnüşleri işlenip düzüldi.