
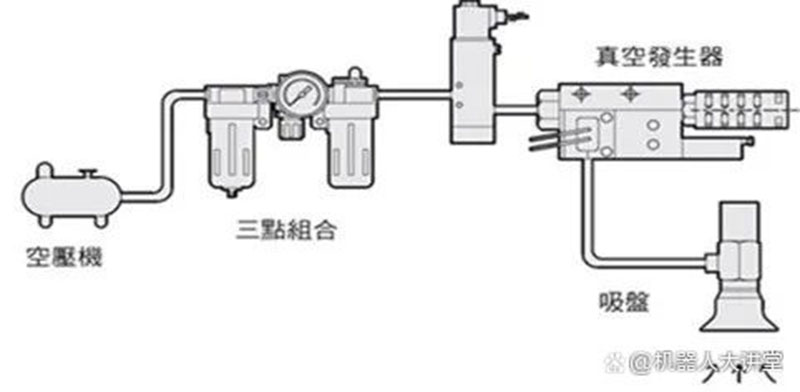
Funksiýa gurluşy nukdaýnazaryndan vakuum generatorynyň ýerine ýetirilmegi, esasan, wakuum generatoryny otrisatel basyş emele getirmek we saklamak üçin iş bölegini özüne çekmek we çykarmak wezipesine ýetmek üçin elektromagnit dolandyryş klapanydyr.
Netijede ulgam adatça aşakdaky bölekleri öz içine alýar: 1. Gysylan howa çeşmesi;2. Süzgüç;3. Solenoid klapany çalyşmak;4. Wakuum herekete getiriji;5. Ahyrky sorujy käse, howa ýassygy we ş.m. (Aşakdaky suratda adaty gurluş görkezilýär).
Mundan başga-da, wakuum adsorbsion prosesine gözegçiligi amala aşyrmak üçin senagat awtomatizasiýasynyň talaplaryna laýyklykda, käbir öndürijiler soňky ýyllarda akym hasaplaýjylary, basyşy kesgitleýji wyklýuçateller we ýakynlyk wyklýuçatelleri ýaly pnewmatik dolandyryş komponentlerini goşýarlar.
Şeýle-de bolsa, komponentleriň köpüsi müşderiniň isleglerine we ýerdäki iş şertlerine görä integrator tarapyndan üýtgedilendigi sebäpli, tutuş ulgamyň çylşyrymlylygy köplenç ýokary bolýar.
Şol bir wagtyň özünde, köp komponent öndürijiler çylşyrymly gurnama we işe girizilmegine sebäp bolýar we olaryň käbiri ýokary energiýa sarp edýär we gaz çeşmelerine 100% garaşly.Bölekleýin integrasiýa mümkin däl bolup biler
Lityum batareýalary we ýarymgeçirijiler ýaly ýokary takyk we ýokary arassa gurşaw üçin kabul edip bolmajak kynçylyklary aňladýan ses hapalanmagyndan gaça duruň.
Umuman aýdanyňda, EVS goşmaça gysylan howa çeşmesini talap etmeýän, şübhesiz gözüňi özüne çekýän elektrik akylly wakuum hereketlendirijisiniň täze nesli.
Howany tygşytlaýjy ulgamyň iň uly peýdasy, gurnamagyň aňsatlygydyr.Sebäbi bu, şübhesiz, howa kompressorlary, howa saklaýjy baklar, howany arassalaýjy enjamlar we çykyş turbalary we ş.m. köp sanly kömekçi komponentleri azaldyp biler, bu bolsa simleri müşderileriň ulanmagy üçin has aňsat we düşnükli edip biler.
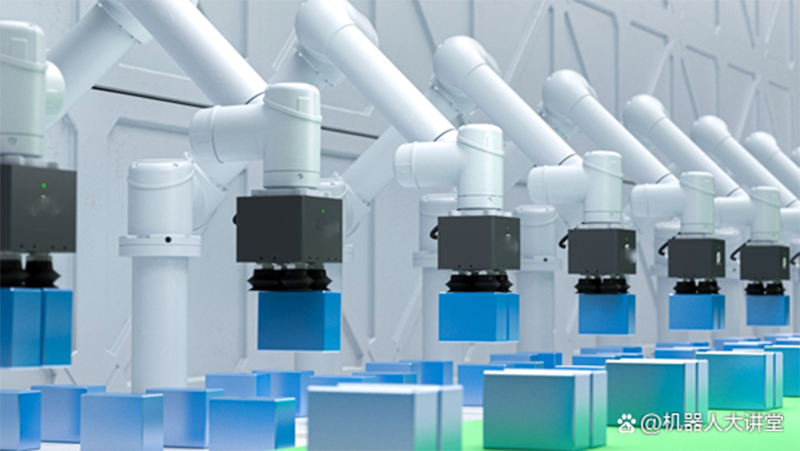
Häzirki wagtda ykjam robot platformalary, 3C elektron gurnama, litiý batareýasyny öndürmek, ýarymgeçiriji önümçiligi, ekspress logistika we ş.m. ýaly köp sahnanyň birneme ykjam giňişlik düzülendigi habar berildi.
EVS08 sorujy kwadrat batareýa
Has giňişleýin we artykmaçlyklary
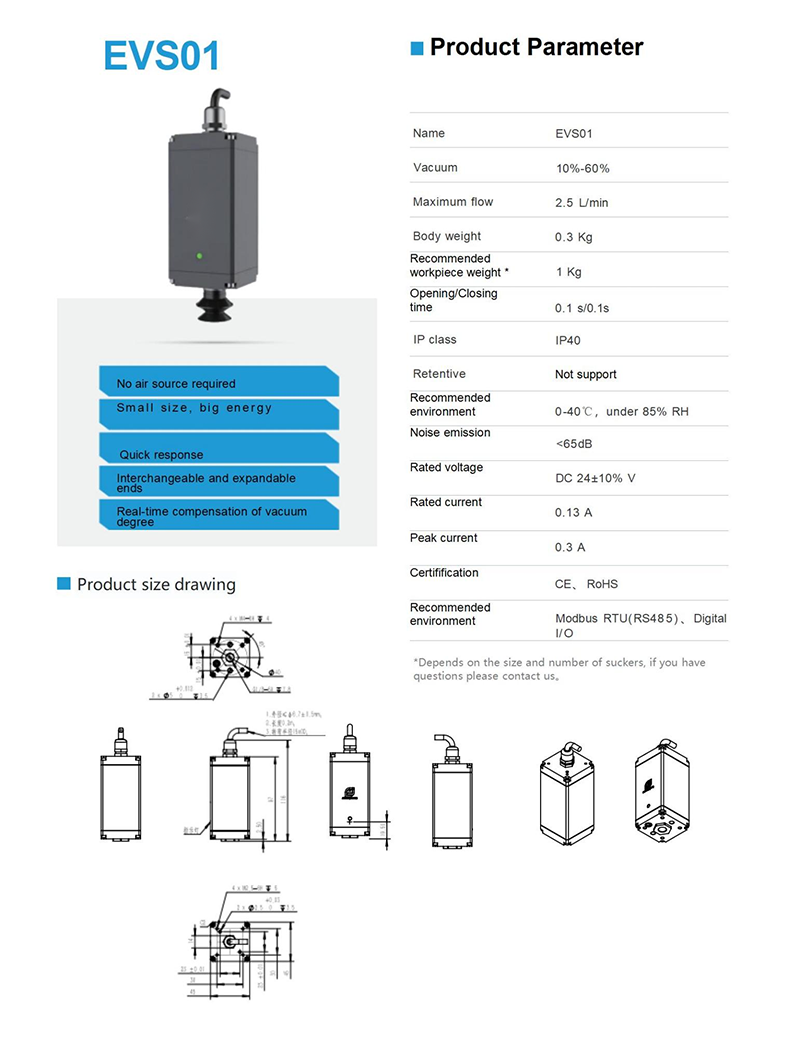
Robot leksiýa zaly gaty kiçi görünýän we agramy bary-ýogy 2,5 kg bolan bu önümiň 10 kg ýokary derejä ýetip biljekdigini öwrendi.24V pes woltly dizaýn sebäpli, energiýa sarp edilişi adaty pnewmatiki ulgamyň 20% -ini düzýär we ahyrynda adsorbsion güýji sazlanyp we sazlanyp bilner we adsorbsion güýji 102-510N ýetip biler.
Gurluş dizaýny taýdan EVS has ykjam we ýeňil gurluş dizaýnyny kabul edýär, bu bolsa şol bir agram üçin adaty aerodinamikadan 30% kiçi bolýar.
Şol bir wagtyň özünde, gereksiz kömekçi komponentleri azaldýan, ulanmagy has çeýe edýän, çalt ýerleşdirilip bilinýän we esasanam uly amatly zatlary aňsatlyk bilen siňdirip bilýän robot goluň ujundaky birleşdirijä gönüden-göni birikdirilip bilner. ýygnamak, işlemek we beýleki sahna amallary.
Ulanylyşyň amatlylygyny ýokarlandyrmak üçin elektrik vakuum hereketlendirijisiniň toplumlaýyn interfeýsi bar, ol obýektleriň adsorbsion prosesine gözegçilik etmek we gözegçilik etmek üçin ulanylyp bilner.
Müşderilere wakuum hereketlendirijisiniň wakuum derejesini görkezmeler arkaly gözegçilikde saklamak, şeýle hem adsorbsion prosesine gözegçilik etmek we çaklamak üçin IO baglanyşygy arkaly birikmek üçin amatlydygy habar berildi.Monitorlagdaý gözegçiligi ýalňyşlyklary we iş wagty azaldýar we ulgamyň elýeterliligini üpjün eder.
Şol esasda, EVS-iň artykmaçlyklary we aýratynlyklary aşakdaky nokatlarda hem görkezilýär:
1. Ykjam gurluş we ýeňil agram: EVS şol bir agramy siňdirende adaty pnewmatik ululykdan 30% kiçidir.Loadüküň siňdirilmegini amala aşyrmak üçin mehaniki goluň ujundaky birleşdiriji bilen birikdirilip bilner, esasanam gaplamak, işlemek we beýleki sahna amallary üçin amatly;
2. Terminalyň bol konfigurasiýasy: Dürli obýektleriň, şol sanda inedördül, sferik we ýörite görnüşli komponentleri ele almak üçin dürli görnüşli sorujy käseler, howa ýassygy we beýleki komponentler düzülip bilner;
3. Iki kanal özbaşdak dolandyrylyp bilner: vakuum hereketlendirijisiniň çep we sag taraplaryny aňsatlyk bilen dolandyryň we iki tarap hem biri-birine garaşsyz bolup, önümçilik liniýasynyň iş netijeliligini hasam ýokarlandyrýar.Bir wagtyň özünde emdirmegi we ýerleşdirmegi amala aşyrýar, bu obýektleriň işlenmegini we tertipleşdirilmegini ep-esli ýeňilleşdirýär, ýer we wagt tygşytlaýar;
4. Düzülip bilinýän sorulma: wakuum derejesi sorulan önümiň aýratynlyklaryna görä sazlanyp bilner we wakuumyň hakyky öwezini dolmak amala aşyrylyp bilner;
5. feedbackagdaýyň seslenmesi: Onda wakuum seslenme datçigi bar, ol obýektleriň adsorbsion ýagdaýyny hakyky wagtda kesgitläp we seslenme we duýduryş berip biler;
6. Elektrik toguny goramak: Elektrik togy öçürilenden soň, adsorbsion zatlary goramak üçin adsorbsionyň öz-özüni gulplamagy amala aşyryp biler;
7. Güýçli uýgunlaşma: 24V I / O we MODBUS RTU (RS485) aragatnaşyk protokolyny goldaň;
8. Gurmak we düzetmek aňsat: aragatnaşyk protokoly ýönekeý we okalýar, bu çözmegiň kynlygyny ep-esli azaldýar.Mundan başga-da, kabul ediji kompýuter düzediş programma üpjünçiligi sowgat hökmünde goşulyp bilner, funksiýanyň parametrlerini awtonom görnüşde düzmek we redaktirläp bolýar.
Netije we geljek
Awtomatlaşdyryş we intellekt tendensiýasynda, elektrik vakuum hereketlendirijileri robotlaryň we awtomatlaşdyryş ulgamlarynyň kadaly işlemegini üpjün etmek üçin esasy komponente öwrülip, elektrik herekete getiriji ulgamlary ulanmagy has amatly we ulanmagy aňsatlaşdyrýar we has köp dürli ssenariýalara duşup biler. ykjam birleşdirilen robotlar..
Toplumlaýyn interfeýs we baý terminal konfigurasiýasy we beýleki optimizasiýalar robotyň esasy bölekleriniň ygtybarlylygyny hasam ýokarlandyryp biler, ahyrky ulanyjylar üçin önümçiligiň togtadylmagyny we uzakdan ýerleşdirilmegi meselesini azaldyp biler, tehniki hyzmat we satuwdan soňky çykdajylary hasam azaldyp biler.
Iş wagty: Aprel-19-2023