TI5ROBOT KOLLABORATIW ROBOT


"Ti5robot görüş", akylly innowasiýa bilen dolandyrylýan we R&D, robot enjamlaryny öndürmek we öndürmek boýunça akylly robot enjamlary bilen üpjün etmek çözgütlerine esaslanýar.Müşderilere tygşytly akylly robot enjamlary we duýgur dolandyryş tehnologiýa çözgütleri bilen üpjün edýär we üznüksiz çykýar we baha döredýär.
HYZMATDAŞ HYZMAT
Bazardaky adaty enjamyň müşderileriň islegini kanagatlandyryp bilmejek meseläni çözüň.
Müşderiler üçin önümiň ösüş siklini tygşytlaň.Müşderiler üçin enjam tehniki zehinleriniň ýetmezçiligini aradan aýyryň.
SUPERB COLLABORATlON ABlLlTY
Akylly robotyň täze görnüşi hökmünde adam-maşyn hyzmatdaşlygynyň päsgelçiliklerini aýyrmaga bagyşlanýar.
Robot garawullaryň ýa-da kapasalaryň gandallaryndan doly gutular.
| Esasy parametrler | Ti5 Robot Arm-3 |
| Agram | 9.2kg |
| Loadük | 3kg |
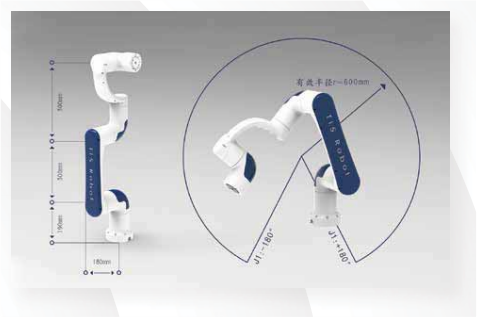
| Iş radiusy | 600mm |
| Gaýtalanýan pozisiýa takyklygy | 0.05mm |
| Erkinlik | 6 |
| Adaty güýç sarp etmek | 160w |
| Dolandyryş bilen interfeýs | ROS dolandyryşy , PYBULLET dolandyryşy sp malina pirogyna gözegçilik Y PYTHON dolandyryşy , C ++ dolandyryş modully dizaýn , aňsat sökmek we ýygnamak , servo motor + garmoniki reduktor. |
| Elektrik enjamlary | Çeýe tork hereketlendirijisi + garmoniki reduktor |
| Mains | 24-48V |
| Bilelikdäki aralyk | J1 (+/- 180。) J2 (-265。 ~ 85。) J3 (+/- 150。) J4 (+/- 180。) J5 (+/- 175。) J6 (+/- 175。) |
| Material | Alýumin garyndysy, rezin |
| Iş gurşawy | 0。C - 50。C |
| Elektrik üpjünçiligi | DC 48V, 5A; DC 24V, 5A |
| Motor parametrleri | Boş garmoniki robotyň birleşdirilen bogun |
| Bluetooth | 4.2 |
| USB | 4 |
| HDMI | 1 |
| IO interfeýsi | 4 |
| Gyssagly wyklýuçatel | 1 |